Dần dần với phát triển của công nghệ, khả năng robot di chuyển "tự do" như con người dẫn trở thành hiện thực. Robot AGV có khả năng di chuyển tự do thường được gọi là AMR (Autonomous Mobile Robots).
Nguyên lý rất đơn giản, di chuyển "tự do" tức là robot không cần bất kỳ thiết bị hỗ trợ nào từ bên ngoài, như dây dẫn, băng từ, điểm từ tính, thiết bị phản chiếu, ...
Bây giờ, mời các bạn tìm hiểu công nghệ cũng như cách thức AMR hoạt động nhé.

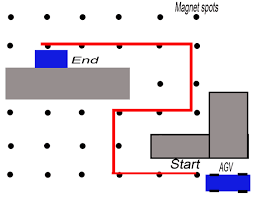
AMR di chuyển bằng cách nhận diện và "sơ đồ hóa" khu vực xung quang bản thân robot. AMR có thể bám theo băng từ, hoặc nhận diện tường để di chuyển với khoảng cách tới tường được xác định trước.
Trước khi bắt đầu tìm hiểu sâu hơn, chúng ta tìm hiểu về công nghệ SLAM, công nghệ mà robot sử dụng để có thể di chuyển "tự do"
SLAM là gì ?
Thuật ngữ SLAM là viết tắt của "Simultaneous Localization And Mapping", tạm dịch là "định vị và xây dựng bản đồ đồng thời". Do vậy AGV sử dụng công nghệ SLAM có thể tự tính toán môi trường xung quanh và xác định vị trí của chính mình trong khu vực đó..
Công nghệ dẫn đường SLAM trong ngành công nghiệp robot AGV
Công nghệ dẫn đường SLAM mới từng bước thâm nhập vào ngành công nghiệp AGV. Dần dần theo các chuyên gia dự đoán, SLAM sẽ thay thế toàn bộ công nghệ truyền thống như Băng từ, Điểm từ tính, ...
Hiện tại SLAM vẫn được xem là công nghệ mới, nên trên thế giới hiện nay, một số nhà sản xuất tự phát triển SLAM cho riêng mình, còn lại thì đa phần đều phải mua lại của các nhà cung cấp SLAM chuyên nghiệp.
Có hai vấn đề mà nhân loại phải vượt qua trước khi có thể thấy nó phổ biến trên thị trường:
- Di chuyển tự do sẽ rất phức tạp, phụ thuộc nhiều vào hiện trạng cũng như môi trường thay đổi.
- Hiện nay đã có một số nhà cung cấp phần mềm SLAM đủ rẻ, tuy nhiên giải pháp AGV+SLAM vẫn là đắt đỏ so với công nghệ dẫn đường truyền thống..
Nhiệm vụ của phần mềm là gì ?.
- Thu thập & xử lý dữ liệu: AGV di chuyển và xây dựng bản đồ hiện trang khu vực xung quanh.
- Đồng bộ dữ liệu: dữ liệu nhận được sẽ được so sánh với môi trường "lý thuyết" được nhập vào hệ thống trước đó.
- Tính toán hiện trạng: AGV sẽ phải tính toán mình đang ở đâu dựa trên dữ liệu thu được và dữ liệu nhập sẵn.
- Cập nhật trạng thái: trạng thái và bản đồ liên tục được cập nhật, so sánh giữa dữ liệu cũ và mới..
Tất cả các tính toán này được thực hiện bởi thuật toán mạnh/ tiên tiến, và rất phụ thuộc vào người phát triển phần mềm. Ngoài ra, kết quả thu được cũng phụ thuộc vào công cụ và phương thức thu thập dữ liệu.
Do vậy, SLAM được xem như vấn đề có tính chất “tổ hợp”, chứ không đơn thuần là một thuật toán hay bài toán đơn thuần.
Robot AGV xây dựng bản đồ xung quanh như thế nào ?
Có một vài phương pháp để xây dựng bản đồ và đánh dấu môi trường xung quanh, để nhận biết vị trí robot AGV. Tuy nhiên mỗi nhà sản xuất sẽ có cách thức khác nhau.
LiDAR AGV là gì?
Robot AGV chủ yếu sử dụng công nghẹ dẫn đường LiDAR (Light Detection and Ranging) tạm dịch là "Phát hiện và đo lường bằng tia laser". Robot LiDAR AGV đo khoảng cách tới đích bằng cách làm nổi bật vật đích bởi tia laser. Thời gian cũng như bước sóng tia laser phản hồi về được dùng để mô phỏng vật thể đích bằng không gian 2 chiều hoặc 3 chiều.
LiDAR AGV phát chùm tia laser trong quá trình di chuyển, cùng lúc đó robot này thu tín hiệu laser để về xác định bản đồ và xác định vị trí của AGV.
Sóng siêu âm: robot AGV cũng có thể dùng sóng siêu âm để định vị. Sóng siêu âm là công nghệ cũ so với LiDAR và ít tốn kém hơn, tuy nhiên độ chính xác thì kém hơn nhiều so với laser.
Định vị bằng hình ảnh
VGV (Vision Guided Vehicle, tạm dịch robot dẫn đường bằng hình ảnh) thường dùng often use stereo or triclops system để đo khoảng cách. Việc sử dụng hình ảnh như vậy, có thể nói như cách con người nhìn thế giới xung quanh, do vậy dữ liệu thu được sẽ đa dạng và phức tạp hơn nhiều so với công nghệ laser hay sóng siêu âm.
Vấn đề hiện nay đó là công nghệ hình ảnh đưa về dữ liệu quá lớn & giá trị, để xử lý hiệu quả dữ liệu này thì cần thuật toán cũng như hệ thống mạnh. May mắn là đến thời điểm hiện tại, công nghệ và khả năng xử lý hình ảnh cho VGV đã được cải thiện rất nhiều, đem lại cho VGV sự ổn định, tin cậy và hiệu quả.
Đến đoạn này, bạn đọc vẫn sẽ phân vân không biết AGV xác định vị trí của mình như thế nào?
Hiện nay có 3 phương pháp để xác định vị trí
Phương pháp 1: scan-to-scan
- Dữ liệu nhận từ cảm biến (ví dụ LiDAR) dùng để tính toán vị trí của AGV giữa "2 lần quét". Kết quả là AGV sẽ biết được vị trí của mình ở thời điểm hiện tại (quét lần 2).
- Phương pháp này không phụ thuộc vào bản đồ được định nghĩa trước. Do vậy rất phù hợp trong trường hợp không có bản đồ sẵn, hoặc bạn dùng phương pháp này để tự vẽ lên bản đồ.
- Vấn đề của phương pháp này nằm ở sai số. Sai số có khả năng ngày càng tăng qua các lần quét tín hiệu, nếu không có biện pháp điều chỉnh sai số thì phương pháp này không đạt độ tin cậy.
Phương pháp 2: Đối chiếu giữa "quét" và "bản đồ"
- Trong phương pháp so sánh dữ liệu giữa quét và bản đồ, thì nguyên lý là kết quả của so sánh ở trên được dùng để tính toán vị trí AGV dựa theo bản đồ ảo (được nhập vào hệ thống quản lý AGV từ trước).
- Phương pháp này loại bỏ được nhược điểm của phương pháp 1, tức là không có sai số tích lũy. Tuy nhiên nhược điểm của phương pháp này là có thể xảy ra lỗi khi không thể nào "khớp" được dữ liệu của quá trình quét và bản đồ ảo. Tình huống này hay xảy ra khi mặt bằng thường xuyên có sự thay đổi.
Phương pháp 3: kết hợp với Combination with odometry
- Khi thực tế là không có phương pháp nào hoàn toàn thỏa mãn nhu cầu thực tế cũng như đủ đáng tin cậy, vậy sẽ có phương án để bù đắp: kết hợp "quét-so sánh với-quét", "quét-so với-bản đồ" và dữ liệu nhận được từ "cảm biến xác định vị trí dựa trên chuyển động" để xử lý các vấn còn tồn tại của hai phương pháp trên, để có được kết quả chính xác nhất.
- Thành phần quan trọng của SLAM là dữ liệu thu được từ "cảm biến xác định vị trí dựa trên chuyển động" (ví dụ như: gia tốc, encoder của bánh xe, con quay hồi chuyển, ...).
- Cuối cùng, robot AGV kết hợp tất cả thông tin có được để tính toán vị trí thực tế chính xác nhất.
Ưu điểm của robot AGV sử dùng SLAM?
- Đầu tiên, đó là TƯƠNG LAI của loài người và công nghệ
- Dễ dàng lắp đặt: triển khai nhanh, bạn chỉ cần bật robot lên, vẽ bản đồ (hay nhập bản đồ) trên máy tính, đồng bộ với robot, thế là xong.
- Không cần thành phần phụ khi lắp đặt.
- Không tốn chi phí bảo trì hệ thống liên quan đến robot.
Nhược điểm của AGV sử dụng SLAM là gì ?.
- Nhiều vấn đề phát sinh trong trường hợp thay đổi hiện trạng, môi trường xung quanh.
- Chi phí đắt đỏ.
- Độ chính xác thấp hơn so với phương pháp truyền thống
When is useful to choose AGVs with natural Navigation?
Natural Navigation will substitute other kinds of navigation such magnetic navigation, optical navigation ,ecc.
It’s good solution for AGCs and Tow tractors. The main AGV manufacturers are developing and including this technology in their AGVs.
Are you thinking....AGC what???? So you do not know what is an Automated Guided Cart... you must read this article: Automatic Guided Cart
The main concern about Natural technology is its reliability in variable environments such production lines where there’s continuous movement of people, manned means, boxes, pallets, etc. In this conditions a mobile robot with natural navigation might not find where it is.
For this reason, Natural Naviagtion is a great solution for AGVs when you have well defined profiles and environments with fixed structures such walls, columns.
Natural Navigation is the best solution for applications such Ecommerce Distribution Centres or Hospitals. In general, in any environment with low level of “confusion”.